Ladies and gentlemen… On your marks!
Mixture models
Si consideri la seguente specificazione gerarchica di un modello mistura
\[Y_{n} \mid S_{n}=g, \theta_{g} \sim f\left(\cdot \mid \theta_{g} \right), \quad n =1,\ldots, N\] \[S_{n} \mid \pi_G \sim \text{Mult}_G\left(1, \pi_G \right), \quad \pi_G \sim \text{Dir}_G(\pi_0),\] \[\theta_g \sim p(\cdot \mid \theta_{0,g}), \quad g=1,\ldots,G,\] \[G \sim p(\cdot \mid G_0),\]per il quale è di interesse svolgere una qualche analisi a posteriori, una volta osservato un campione \(N\) dimensionale \(y_{1:N}\)
MCMC & Cluster Allocations
Un approccio elementare al problema prevede l’utilizzo di algoritmi MCMC (Gibbs Sampler, MH within Gibbs, …).
Generalmente, questi algoritmi simulano iterativamente dalle full conditional dei parametri
Le allocazioni vengono aggiornate una alla volta condizionatamente al resto
\[S_n \mid S_{1:(n-1), (n+1):N}, \theta_{1:G},\pi, {y}_{1:N}\]in accordo con la loro distribuzione full conditional
Con \(N\) grande, calcolare le distribuzioni full conditional può essere oneroso e portare a catene mal mixate
Inoltre…
… abbiamo altri problemi!
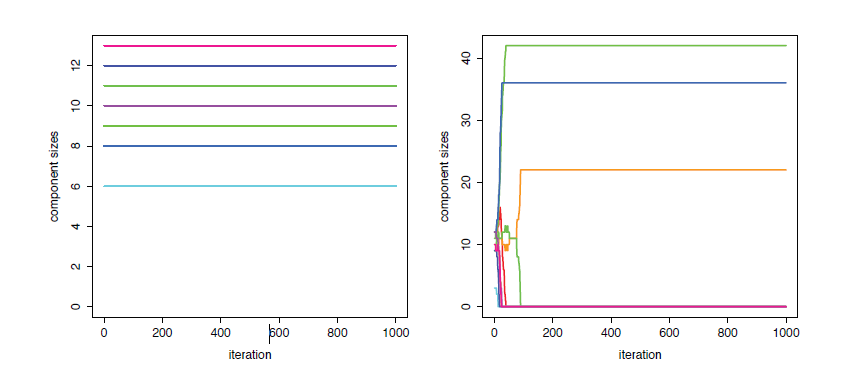
L’esplorazione di tutte le mode non è garantita
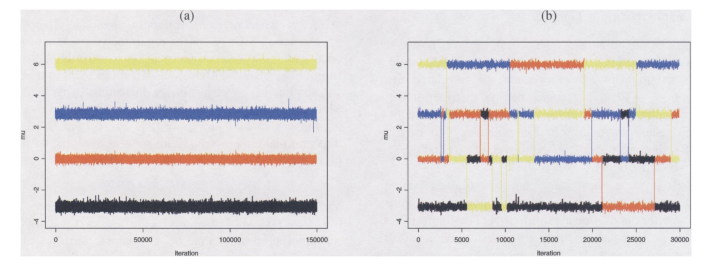
In high-dimensional settings la catena si incastra e non cambia le allocazioni
Risolviamoli: meglio insieme!
Possiamo considerare le allocazioni
\[S_{1:N} = (S_1, S_2, \ldots, S_N) \in \{1, 2, \ldots, G\}^N\]come un unico parametro o, alternativamente, la matrice di selezione
\[\mathbf{S} = \begin{bmatrix}\mathbb{I}(S_1 =1) & \mathbb{I}(S_1 =2) & \cdots & \mathbb{I}(S_1 =G)\\ \mathbb{I}(S_2 =1) & \mathbb{I}(S_2 =2) & \cdots & \mathbb{I}(S_2 =G)\\ \vdots & \vdots & \vdots & \vdots \\ \mathbb{I}(S_N =1) & \mathbb{I}(S_N =2) & \cdots & \mathbb{I}(S_N =G) \end{bmatrix} \in \mathcal{S}^{N,G}\]e considerare in one-step le loro distribuzioni full conditional (eventualmente marginalizzando una parte di parametri)
Qualche riferimento
-
Nobile and Fearnside (2007) Bayesian finite mixtures with an unknown number of components: the allocation sampler (Stat Comput)
-
Fong, Wakefield and Rice (2012) An efficient Markov chain Monte Carlo method for mixture models by neighborhood pruning (JCGS)
-
Schäfer and Chopin (2013) Sequential Monte Carlo on Large Binary Sampling Spaces (Stat Comput)
-
Titsias and Yau (2017) The Hamming ball sampler (JASA)
-
Zanella (2020) Informed proposals for local MCMC in discrete spaces (JASA)
The allocation sampler
L’algoritmo considera le allocazioni e il numero di gruppi congiuntamente, dopo aver integrato via i parametri del modello (quando possibile)
È composto da due tipi di moves (stocastiche):
- Quelle che non cambiano il numero di gruppi \(G\)
- Quelle che cambiano il numero di gruppi
Pro
- Rimane lo stesso indipendentemente dal numero di osservazioni o dalla famiglie che compongono la mistura
- Non richiede l’invenzione di buone jumping moves tipiche delle tecniche di reversible jump
Cons (opinione basata su prove empiriche)
- Quando la dimensione di una singola osservazione \(y_n\) tende a crescere diventa difficile fare tuning
Fixed G: M1 & M3
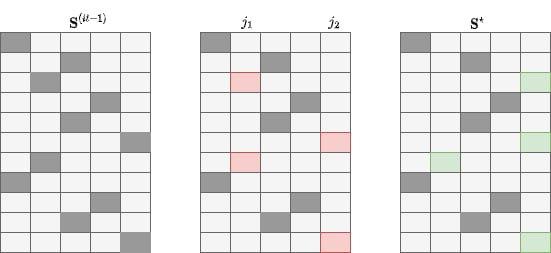
- Seleziona casualmente \(j_1\) e \(j_2\)
- Rialloca gli elementi nei gruppi \(j_1\) e \(j_2\) in \(j_1\) con probabilità \(p\) e in \(j_2\) con probabilità \(1-p\)
Nelle due moves cambia come si sceglie \(p\) (M1: \(p \sim \beta(a, a)\), M3: basata sulla likelihood)
Fixed G: M2 & M4
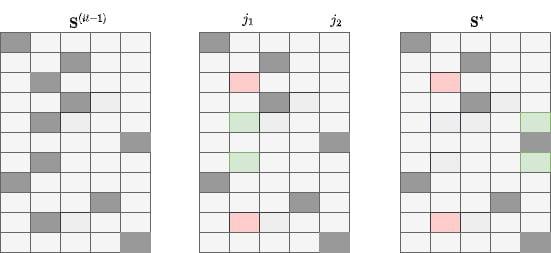
- Seleziona casualmente \(j_1\) e \(j_2\)
- Seleziona casualmente \(m \in \{1,\ldots, n_{j1}\}\)
- Selezione casualmente \(m\) elementi di \(j_1\) e allocali in \(j_2\)
Tra le moves che non cambiano il numero di gruppi viene considerata anche quella dove vengono casualmente cambiate le label dei gruppi
Varying G (caso \(G^\star = G^{(it-1)}+1\))
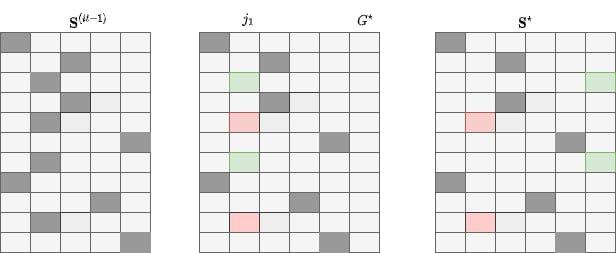
- Seleziona casualmente \(j_1 \in \{1, \ldots, G^{(it-1)}\}\)
- Alloca gli elementi di \(j_1\) in \(j_2 = G^\star\) con probabilità \(p_e \sim \beta(a, a)\)
$a$ è un parametro critico per il buon funzionamento dell’algoritmo
Una nuova move (fixed G)
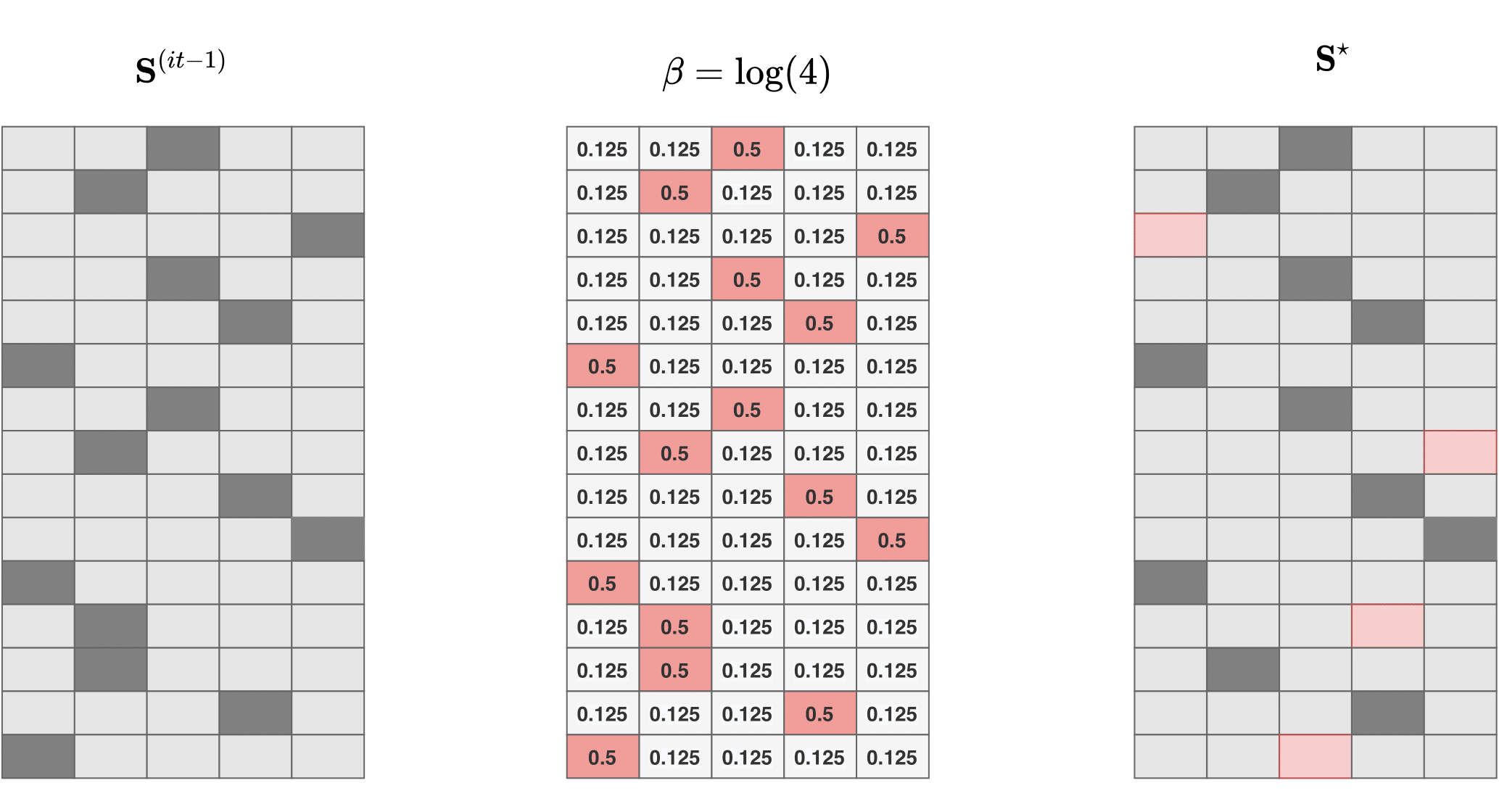
Dato \(\mathbf{S}^{(it-1)}\), ogni riga di \(\mathbf{S}^\star\) viene generata indipendentemente dalle altre in accordo con
\[\operatorname{Pr}\left(S_{n}^{\star}=j \mid S_{n}^{(it-1)}\right)=\frac{\exp \left(\beta \mathbb{I}\left(S_{n}^{(it-1)}=j\right)\right)}{\sum_{g=1}^{G} \exp \left(\beta \mathbb{I}\left(S_{n}^{(it-1)}=g\right)\right)}\]The Hamming ball sampler
Algoritmo MCMC per l’inferenza in modelli che involvono high-dimensional discrete state spaces
Viene introdotta una variabile ausiliaria \(\mathbf{U}\) per la costruzione di uno spazio di esplorazione che viene troncato adattivamente
La particolare costruzione permette la derivazione di un Gibbs sampler
Richiede la definizione di una palla centrata in \(\mathbf{S}\) e di raggio \(m\) (la Hamming ball di raggio \(m\)), per cui \(m\) può essere inteso come un parametro di tuning che può influenzare velocità ed efficacia dell’algoritmo
Costruzione
Viene considerata la seguente fattorizzazione della distribuzione congiunta (aumentata)
\[p(y_{1:N}, \theta, \mathbf{S}, \mathbf{U}) = p(\mathbf{y}_{1:N}, \theta, \mathbf{S}) p(\mathbf{U} \mid \mathbf{S})\]dove
\[p(\mathbf{U} \mid \mathbf{S}) = \dfrac{1}{Z_m} \mathbb{I}(\mathbf{U} \in \mathcal{H}_m(\mathbf{S}))\]è una distribuzione uniforme su $\mathcal{H}_m(\mathbf{S})$,
\[\mathcal{H}_m(\mathbf{X}) = \left\lbrace\mathbf{U}\colon d\left(\mathbf{u}_n, \mathbf{x}_n\right) \leq m,\; n=1,\dots,N\right\rbrace\]è la Hamming ball di raggio \(m\) e \(d\left(\mathbf{u}_n, \mathbf{s}_n\right)\) è la distanza di Hamming tra i blocchi \(\mathbf{u}_n\) e \(\mathbf{s}_n\) di \(\mathbf{U}\) e \(\mathbf{S}\), rispettivamente
Gibbs sampler
Data la particolare costruzione dello state space, l’algoritmo itera i seguenti passi
- \[\mathbf{U} \leftarrow p(\mathbf{U} \mid \mathbf{S})\]
- \[\mathbf{S} \leftarrow p( \mathbf{S} \mid \theta, \mathbf{U}, y_{1:N})\]
- \[\theta \leftarrow p(\theta \mid \mathbf{S}, y_{1:N})\]
dove gli step 2 e 3 possono essere accorpati se disponibile un buon passo Metropolis
Il ruolo di \(\mathbf{U}\) è quello di fare decluttering, localizzando la ricerca di \(\mathbf{S}\)
A differenza di un classico passo Metropolis, le proposte di \(\mathbf{S}\) vengono sempre accettate
Informed proposals
Zanella (2020) propone un framework per la costruzione di proposal informate in spazi discreti di dimensione notevoli
Usando un confronto Peskun-type tra kernel, caratterizza esplicitamente la classe delle locally balanced proposals, cioè le proposal ottime in questo framework
Gli algoritmi che ne risultano sono semplici da implementare e più efficienti se comparati alle attuali proposte, comprese le versioni HMC discrete
(Personalmente è un paper che ho trovato difficile, per cui non saprei spiegarlo in due slide o parole, anche se promettente e utile per il mio modello e molti altri contesti)
Take home message
-
Gli algoritmi proposti generalmente lavorano localmente
-
Volendo costruire un algoritmo per simulare in spazi discreti è necessario che la ricerca dei vicini (e il calcolo di eventuali quantità utili all’algoritmo) sia fattibile
-
Esistono varie rappresentazioni matematiche di uno stesso concetto, che possono influenzare i risultati e aprire nuove strade sia da un punto di vista modellistico che algoritmico (labels, matrici di selezione, partizione di $N$ elementi)
Le vostre proposte
Articoli correlati
-
Jain and Neal (2004) A Split-Merge Markov Chain Monte Carlo Procedure for the Dirichlet Process Mixture Model (JCGS)
-
Ni, Müler, Diesendruck, Williamson, Zhu and Ji (2020) Scalable Bayesian Nonparametric Clustering and Classification (JCGS)
Comments
Mattia
Una nota sul post, così imparo a commentare ;)
Le prime due immagini sono state (brutalmente) prese dal libro “Handbook of Mixture Analysis” e dal paper a cura di Fruhwirth-Schnatter, Celeux e Robert e dal paper sul label switching di Stephens (2000). Le altre invece sono state create nel sito draw.io.
Vorrei aggiungere alla lista di paper con prospettive interessanti (quantomeno alternative) il lavoro “Distance Dependent Chinese Restaurant Processes” di Blei e Frazier, 2011 (JMLR). Piuttosto che lavorare con le allocazioni di un cliente del ristorante ad un dato tavolo, cambiano la prospettiva e creano un link tra i vari clienti. I clienti che sono tra loro “connessi”, poi appartengono allo stesso tavolo. Nel paper paragonano il loro algoritmo con un algoritmo standard per i DP, a parità di modello, mostrandone le buone performance in termini di mixing.
Vorrei porre l’attenzione su \(\mathbf{S}\) matrice di selezione \(N \time G\). Secondo voi che ruolo possono avere le matrici \(S^\intercal S\) e \(SS^\intercal\)?
mattia
Aggiungo un’ulteriore nuova ( reference) per il sampling da distribuzioni discrete. Come altre proposte, anche qui si cerca di lavorare localmente, e di cambiare una riga di $\mathbf{S}$ in guardando effettivamente alla forma della distribuzione. Il trick, paradossalmente semplice, è quello di calcolare il gradiente della funzione target fregandosene dello spazio discreto della distribuzione e trattandolo come continuo. L’algoritmo è descritto in maniera compatta in sezione 4. Dicono funzioni, se comparato al benchmark dell’Hamming Ball sampler. Ne discutono alcune proprietà teoriche e si avvalgono del paper di Zanella (2020) già citato.
Leave a Comment
Your email address will not be published. Required fields are marked *